Abstract
RODEO explores how robots could work more independently while still remaining transparent and accountable. The idea is to give robots a way to take on tasks, prove that they completed them, and receive payment automatically through blockchain-based rules. In our study, we tested RODEO with a mobile robot in a lab: it collected trash, sorted it correctly using a smart bin, submitted proof that the job was done, and earned digital tokens as a reward. The robot could then use those tokens to pay for its own battery charging, allowing it to keep operating for longer without direct human control. By combining robotics, blockchain, and proof verification, RODEO shows one possible path toward future organizations where robots can do useful work, be audited when needed, and manage part of their own operation in a trustworthy way.
RODEO architecure
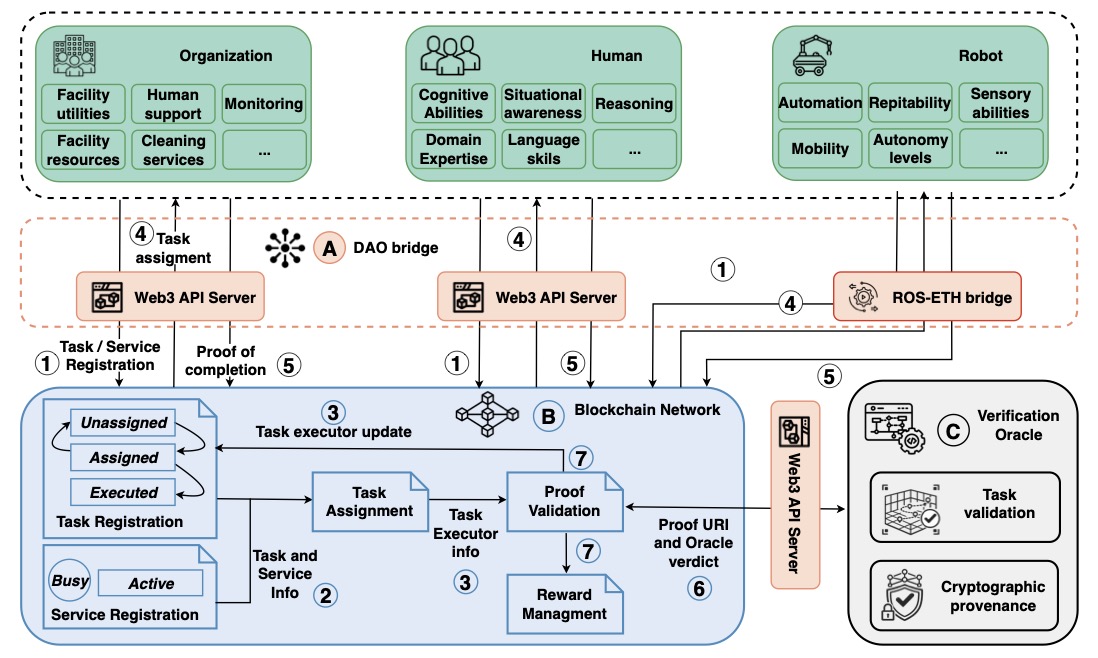
RODEO is organized into three primary architectural building blocks that work together to enable autonomous, accountable robot operations within decentralized organizations:
- DAO bridge
- The DAO bridge serves as the interface layer between all participants in the blockchain network. It provides organizations, humans, and robots with a common programmable API to publish tasks and services, receive assignments, manage rewards, and observe state updates.
- Blockchain network
- The blockchain network addresses the critical issues of trust and liability. It functions as a transparent, tamper-proof ledger that records participant interactions, task completion proofs, and robot data in a way that cannot be altered. Smart contracts define organizational rules.
- Verification oracle
- The verification oracle provides an auditable source of truth by ensuring reward settlement is based on verified physical performance. It validates that task execution proofs are legitimate and unmanipulated and performs emulation-based verification.
Use Case: Cleaning and charging in a university lab The waste disposal workflow
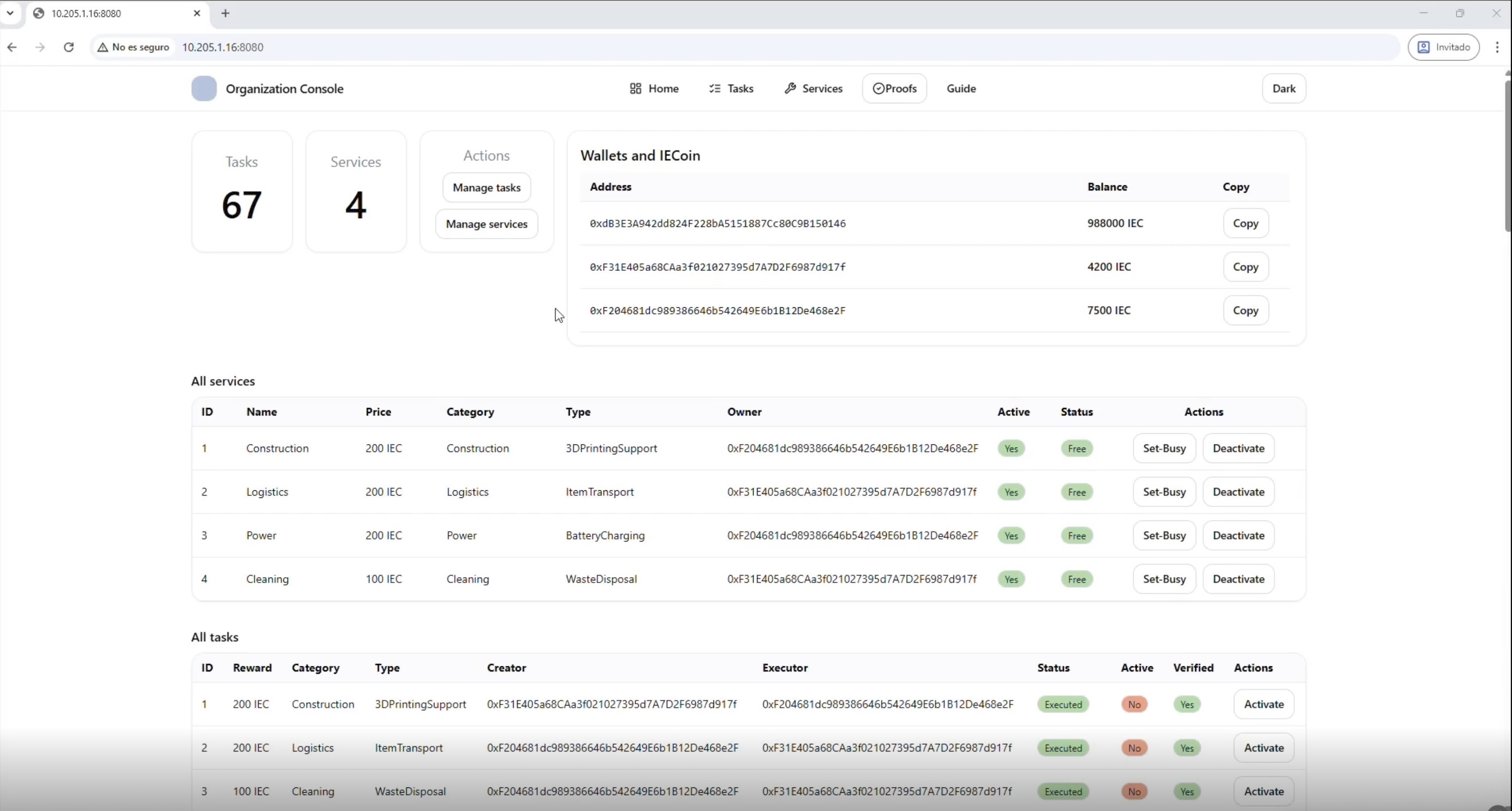
- Organization creates task
- When trash is found in the lab, the organization creates a waste disposal task using a web interface.
- The system assigns it to an available robot.
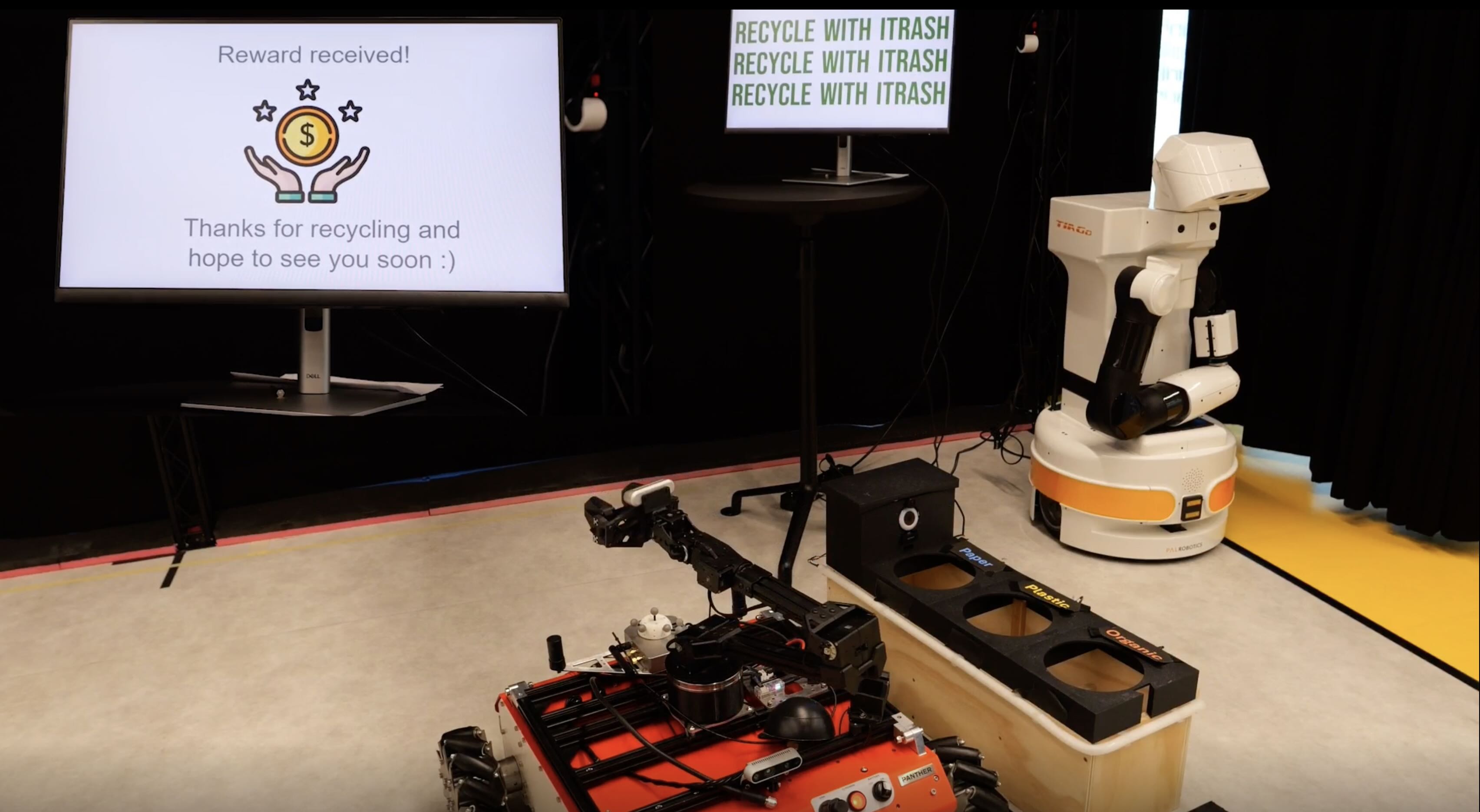
- Robot picks trash
- The robot navigates to the tagged waste item, uses its manipulator to grasp the object, then drives to the iTrash smart bin.
- Disposes correctly
- The robot presents the grasped item to the iTrash camera, queries the classification service, and receives a completion flag after dropping the item in the correct bin.
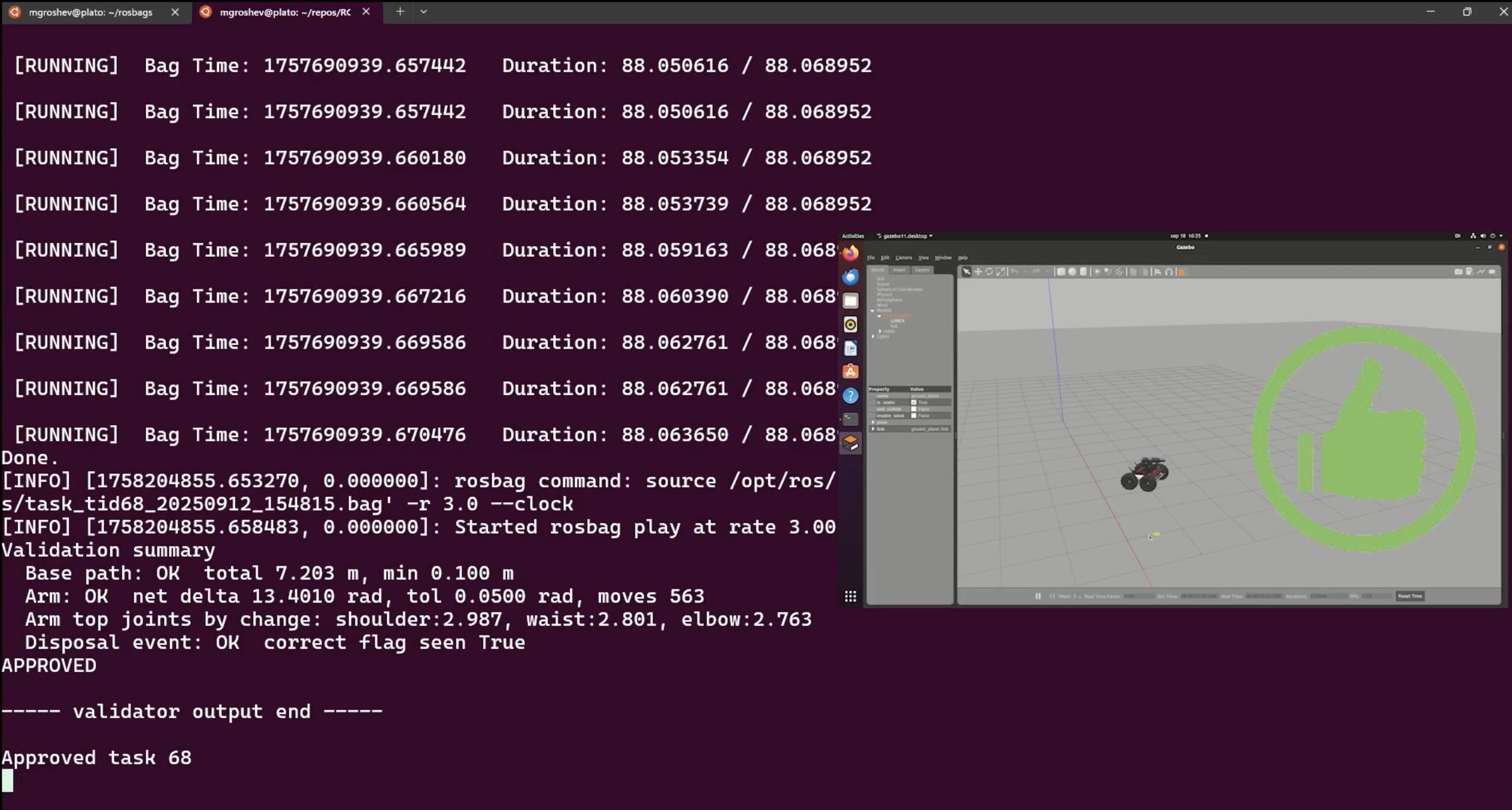
- Submits proof
- After task completion, the robot uploads a rosbag file containing its base trajectory, manipulator poses, gripper release confirmation, and the iTrash success message as verifiable proof.
- Oracle validates
- The verification oracle downloads the rosbag, replays it in Gazebo at 3× speed, and verifies execution checkpoints: pick-and-place stops, manipulator poses, gripper release, and iTrash message.
- The robot receives 100 IEC upon successful validation.
- The smart contract releases the escrowed 100 IEC tokens to the robot’s wallet, compensating it for the completed service.
- If the robot's battery is low, the robot creates charging task.
- When the robot’s battery reaches 50%, it autonomously creates a charging task and navigates to the charging area.
- Charging costs 200 IEC for the robot.
- The robot completes a battery charging session at a fixed electricity tariff of 200 IEC which is paid to the organization.
- Then the organization submits charging proof.
- After the charging session completes, the organization submits energy consumption logs as proof of service delivery.
- Robot reinvests earned funds to extend autonomy.
- The oracle validates the charging proof, the smart contract deducts 200 IEC from the robot’s wallet, and the robot is ready to continue autonomous operation, which is effectively reinvesting its task earnings to extend its operational lifetime.
Publications
Gallery


Research Line
ROBOPRENEUR
The ROBOPRENEUR research line explores robotics systems that harness blockchain-based Smart Contracts (SC)—computer code embedded in the blockchain that automatically manages the transfer of digital assets between agents. By combining these two technologies (i.e., robotics and blockchain), ROBOPRENEUR aims to build robots that can reach full entrepreneurial autonomy: fulfill a …
View Research LineTeam Members

Eduardo Castelló Ferrer
Assistant Professor

Milan Groshev
Postdoctoral Research Associate